

まるで手のように「やさしく」
“つつむ” “はさむ” “つまむ”
ソフトハンドリング用ロボットハンド
ロボットハンドSOFTmatics™は、独自の把持機構により、
"不定形、バラバラ、つぶれやすいワーク"を
やさしくつつむ、はさむ、つまむように
持つことを可能とするハンドです。
こんなお悩みで
お困りではありませんか

やっぱり人の手でやるしかないか・・・
でもそんなに人員確保ができない・・・

があると対応
できない・・・

持つのは
難しい・・・
傷つけてしまう
・・・
(の工程)で跡が付く
・・・

足りない人手に「やさしく」代わる。
手動から自動へ。

SOFTmatics™で搬送の自動化をサポートします。
不定形、傷つきやすい、つぶれやすい「デリケートなワーク」をニッタのソフマティックス™は人の手に代わって、やさしくつつむ、はさむ、つまむことを実現します。
つけたくない
ときに

食材のハンド
リングに
バラツキが
あるときに

ハンドをお探し
のときに

つくときに

あるときに
さらに
カスタマイズで広がる可能性!
ワークをこぼさず持ちたい、グリッパより大きなワークを把持したいなど
ご要望に合わせて指先の形状を変更することも可能です。
(下記形状は一例です。詳細はお問合せください。)
カスタマイズ例 ①
カスタマイズ例 ②

カスタマイズ例 ③


ソフトハンドリング用ロボットハンド
ソフマティックス™ の特長
ソフマティックス™ の5つのポイントをご紹介します。
今まで掴めなかったワークも掴めるように
独自の把持機構で滑らかな動きを実現。柔軟なウレタン素材でやさしくハンドリングすることでデリケートなワークも傷つけずに持つことができます。

衛生的なグリッパで
食品直掴みもOK
食品衛生法に適合した素材を使用しています。また、くぼみ凹みが少なく、ふき取り・洗い流し洗浄に適しています。
※昭和34年厚生省告示第370号(2021年5月現在)
※グリッパボディ部はFDA 21 CFR 177.2600溶出
試験に適合(2023年4月現在)

ツールレスの着脱機構でメンテナンスが簡単
着脱時にネジの落下リスクがなく、洗浄や段替え時の作業時間が大幅に短縮されます。

アルミ材で総重量1.0kg以下※
アルミ材を使用することで、総重量は1.0kg以下に。
※アダプタプレートは含みません。

消耗品はリペア対応
グリッパはリペア可能(有償)です。
※リペア可能箇所についてはお問い合わせください。

ソフトハンドリング用ロボットハンド
ソフマティックス™ の動作原理
グリッパを減圧することで指先が駆動します。復圧することで、開いた状態に戻ります。
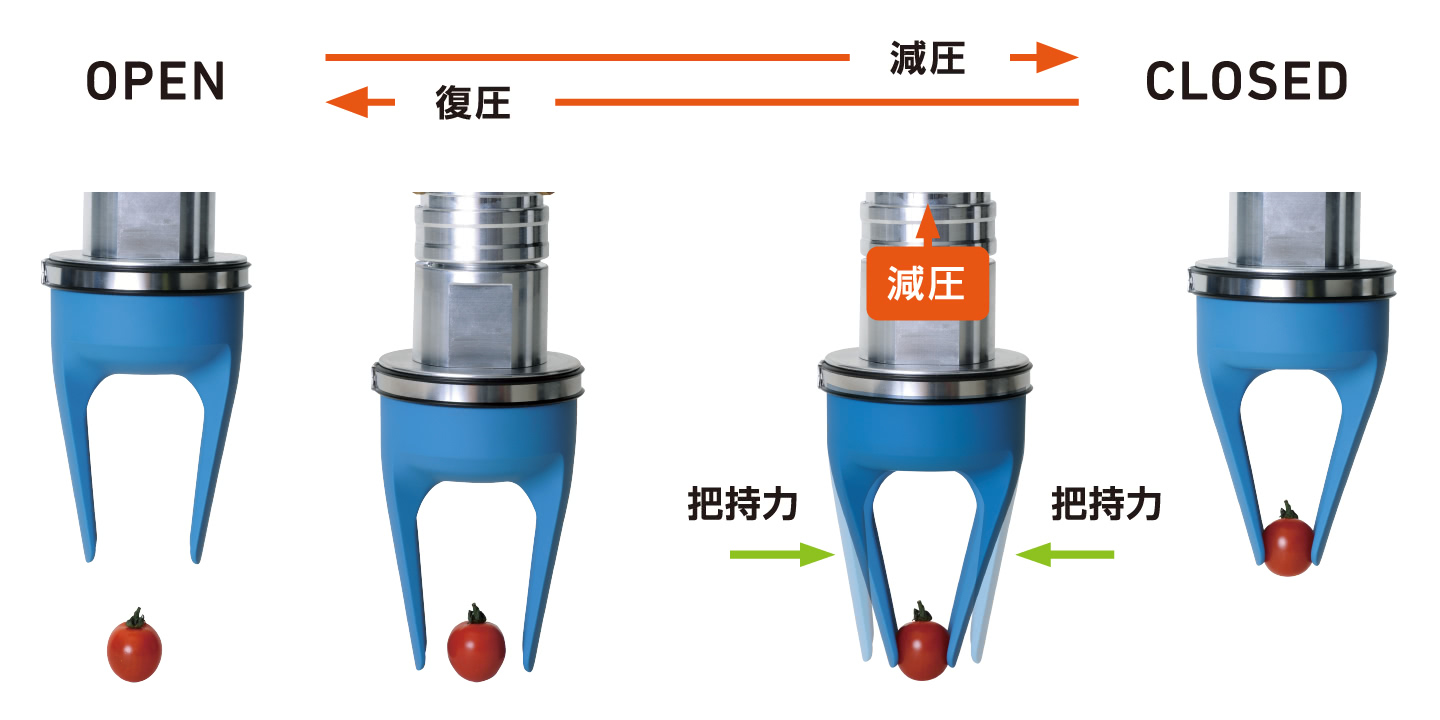
独自設計のシンプルな把持機構
- 減圧することによりグリッパが駆動
- 開閉は空気回路のON-OFFのみ!
- 把持力は圧力調整だけで、
無段階に変更可能!
Check!
動作原理はこちら
SOFTmatics™の動作原理のご紹介
ソフトハンドリング用ロボットハンド
ソフマティックス™ の使用例
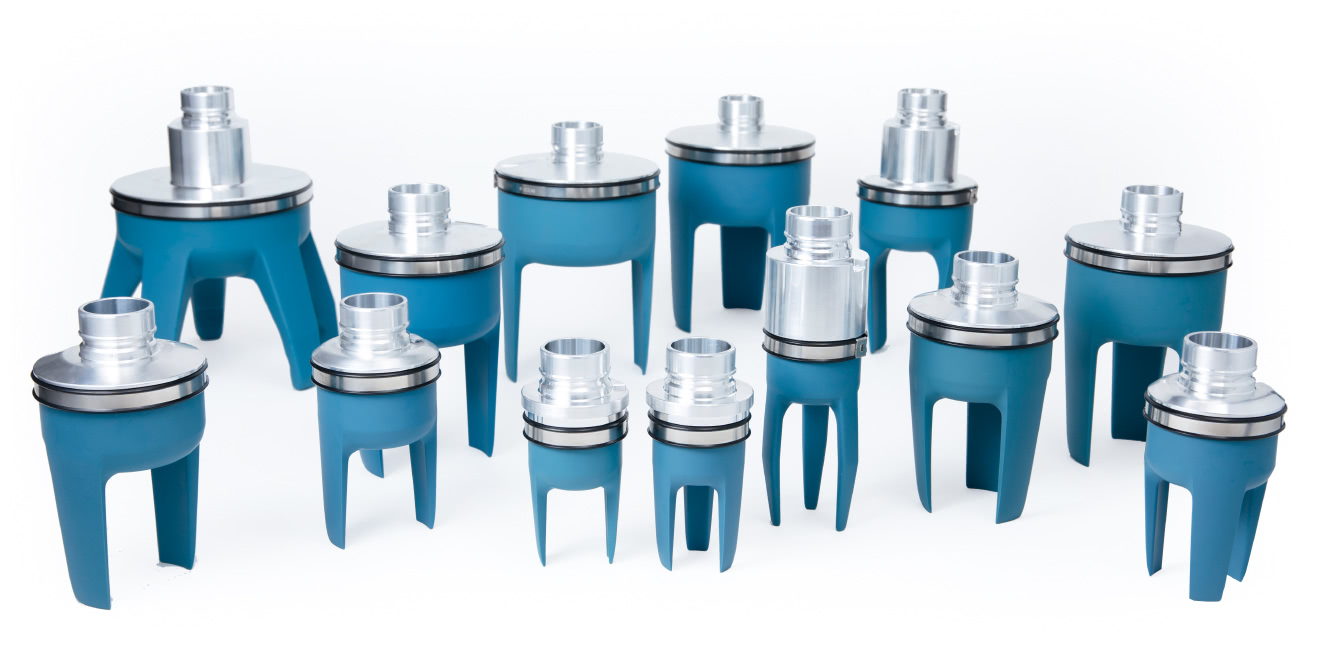
小さなもの〜大きなものまで
ワークに合わせたグリッパ形状
大きさや指形状の異なるグリッパで“つつむ” “はさむ” “つまむ”ことが可能です。
ワークに合わせた最適なサイズと形状が選べるラインナップを取り揃えています。
加工品




Check!
把持動画はこちら
不定形/傷つきやすい/柔らかい
加工食品のロボットによるハンドリング事例

チョコレート

パン
ロールケーキ

厚揚げ

練り物

いなり寿司
唐揚げ
チーズケーキ

サンドイッチ

まんじゅう

おでん
もみじまんじゅう

ドーナツ
シュウマイ

バームクーヘン
不定形/傷つきやすい/柔らかい
野菜・果物のロボットによるハンドリング事例
なすび
りんご
トマト
傷つきやすい/壊れやすい
樹脂容器・ガラス瓶のロボットによるハンドリング事例
ガラスボトル
プラスチック容器
プラスチック容器

ガラス薬瓶
ソフトハンドリング用ロボットハンド
SOFTmatics™の
アプリケーション例
自動化が難しかった作業を実現
大きさや指形状の異なるグリッパで“つつむ” “はさむ” “つまむ”ことが可能です。
ワークに合わせた最適なサイズと形状が選べるラインナップを取り揃えています。
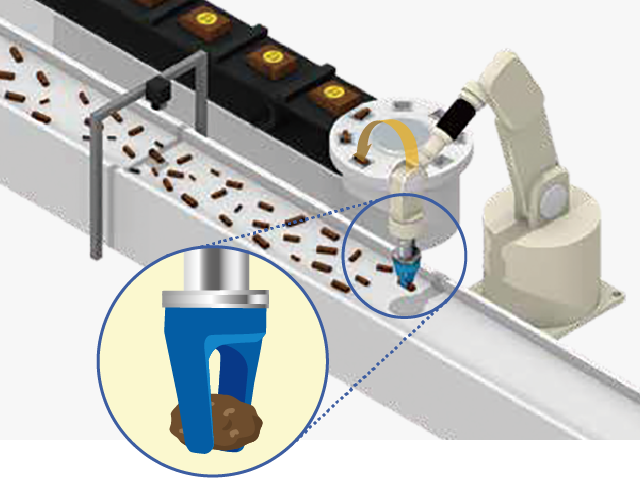
包装機・計量器への投入
ロボットが、ビジョンで認識されたコンベア上のワークをピッキングして包装機へ投入します。SOFTmatics™を用いることで、サイズや形のバラつきがあるチョコのような食材をピッキングすることが可能です。
トレイへのパッキング
ロボットが、コンベア上のワークをピッキングしてトレイに並べます。SOFTmatics™は柔軟なエラストマー材料と減圧駆動を採用しているため、作業環境にも優しく協働ロボットと一緒に使用することで、人がロボットの隣で安心して作業できます。
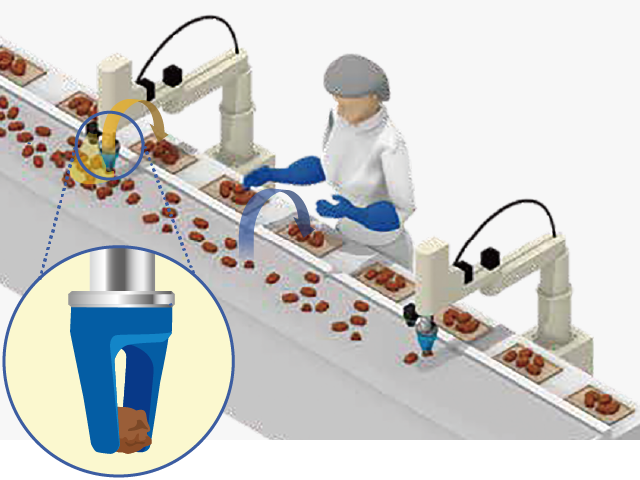
※実際の運用については、必ずお客様にてリスクアセスメントを実施した上でご使用ください。
その他
● 商品、部品の箱詰め作業 ● 加工機へのワーク投入、取り出し
バウムクーヘンのバラツキに追従して把持率UP!
課 題
バウムクーヘンは季節により素材や加工条件が異なるため若干直径が変動します。そのため従来のハンドでは、チャックミスが発生していました。
解 決
バウムクーヘンの直径の変化や個体差のバラつきに追従するSOFTmatics™3本爪タイプを採用。チャックミスを改善しました。
効 果※お客様の声に基づき算出
把持率:95~97% → 100%
装置対応時間:最大4時間/日 → 0時間/日
人の手よりも数段素早く正確で疲れ知らずのピッキングを実現。
ワンタッチ着脱で洗浄しやすい点も好評です。
Check!
アプリケーション例はこちら

バウムクーヘン自動化の
導入事例

衛生面に対応
食品製造工程の自動化
㈱デンソーウェーブ
youtube公式チャンネルへリンクします。

唐揚げの
バラ積みピッキング
オムロン㈱
youtube公式チャンネルへリンクします。
ソフトハンドリング用ロボットハンド
ソフマティックス™ の製品構成と配管例
バルブのON-OFFのみでグリッパを開閉できます。
圧力と流量を調整することで、把持力と開閉時間をそれぞれ調整できます。
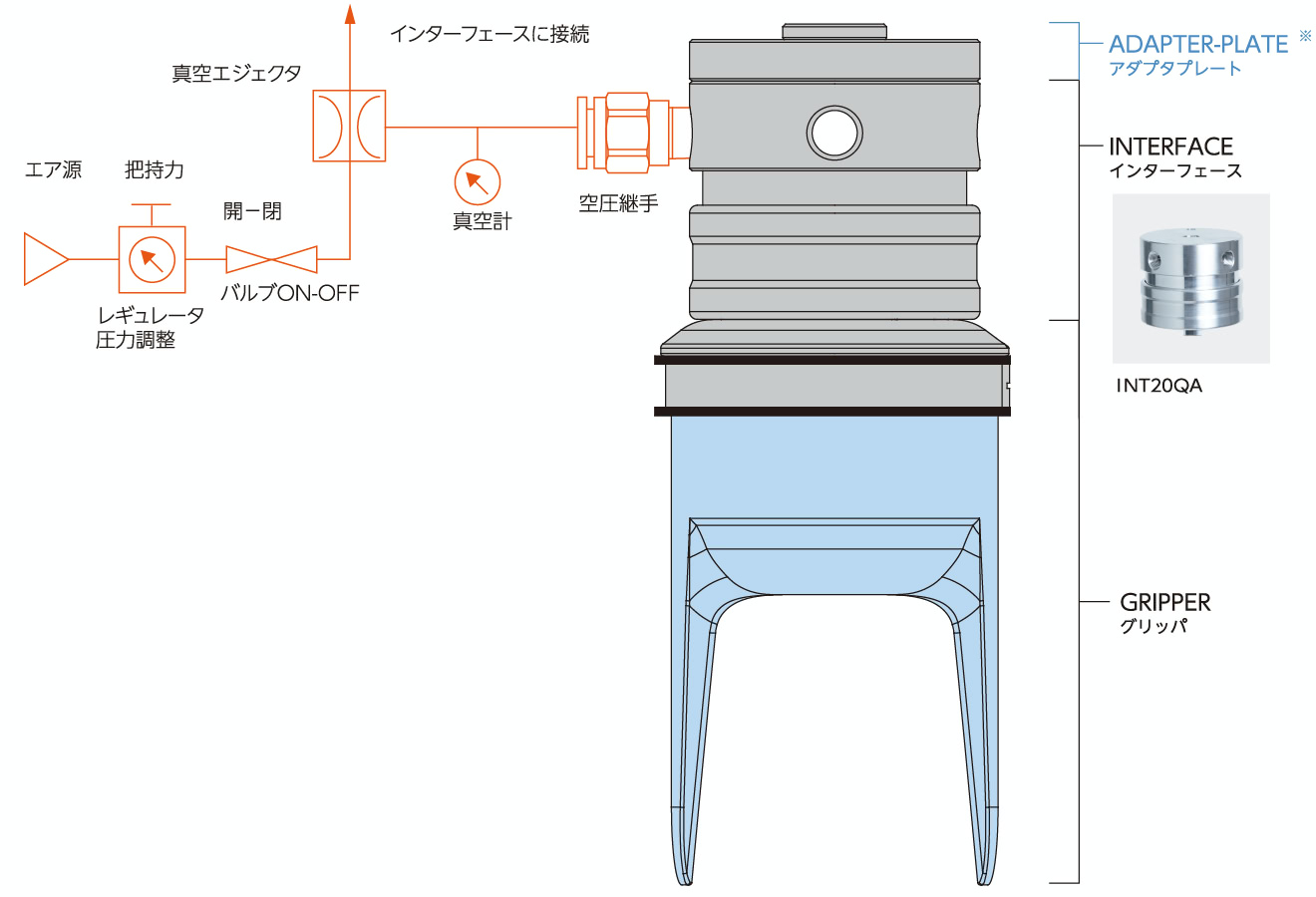
本製品はインターフェースとグリッパで構成されています。
使用にはアダプタプレート、その他周辺機器が必要です。
※ インターフェース、ロボットフランジ形状に合わせて製作ください。
Check!
取付方法、圧力設定はこちら

取付方法のご紹介

圧力設定のご紹介
| 品番 | GR20QA -V3A |
GR20QA -DKA |
GR20QA -BMA |
GR20QA -PB2A |
GR20QA -PC2A |
GR20QA -PD2A |
GR20QA -PE2A |
GR20QA -PF2A |
GR20QA -PB3A |
GR20QA -PC3A |
GR20QA -PD3A |
GR20QA -PE3A |
GR20QA -PF3A |
INT20QA |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
| 質量 (g)※1 |
786 | 436 | 233 | 174 | 285 | 371 | 554 | 815 | 177 | 290 | 380 | 567 | 831 | 155 |
| 参考 可搬質量 (g)※2 |
1380 | 400 | 200 | 120 | 210 | 260 | 320 | 390 | 80 | 250 | 330 | 330 | 460 | -- |
| 高さH (mm) |
70 | 80 | 70 | 45 | 56 | 70 | 80 | 85 | 48 | 58 | 70 | 80 | 85 | -- |
| 最大外径W (mm) |
178 | 87 | 60 | 56 | 70 | 85 | 100 | 115 | 56 | 70 | 85 | 100 | 115 | -- |
| 定格真空度 (-MPa) |
0.03 | 0.06 | 0.08 | 0.06 | 0.06 | 0.04 | 0.03 | 0.03 | 0.06 | 0.06 | 0.04 | 0.03 | 0.03 | -- |
| 想定ワーク サイズ (mm)※3 |
φ140 | φ40 | φ40 | φ20 | φ35 | φ50 | φ65 | φ80 | φ20 | φ35 | φ50 | φ65 | φ80 | -- |
| 図面ダウンロード | ||||||||||||||
| 2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
|
| 3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
* インターフェースはすべてのグリッパに装着可能です。
付属で、取付用のシールワッシャとM8キャップボルトがついています。
※1 グリッパのみの質量です。
※2 可搬質量は対象ワークによって増減します。
把持可否については、デモ機等でお試しください。
※3 想定ワークサイズとは、無理なくアプローチできる
ワークサイズを示します。
● 使用流体:空気
●使用温度範囲:5℃~45℃
● 耐薬品性:熱水・合成洗剤・
エタノールは使用可。
次亜塩素酸は使用不可。

グリッパの取付にはアダプタプレートが必要です。
インターフェースの寸法図を参考にお客様で製作下さい。
取り付けるフランジがISO9409-1、または以下のロボットについては
以下のアダプタプレート参考図面をご参照下さい。
| アダプタプレート品番 | アダプタプレート図面 | 対応するフランジ形状 |
|---|---|---|
| A-ISO9409-1-2-AP | ISO9409-1-31.5-4-M5 | |
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-ISO9409-1-4-AP | ISO9409-1-50-4-M6 | |
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-Y0301-AP | 株式会社安川電機:MOTOMAN-HC10 | |
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-Y0302-AP | 株式会社安川電機:MOTOMAN-HC10DT, MOTOMAN-HC10DT(ハンドキャリータイプ) |
|
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-Y0303-AP | 株式会社安川電機: MOTOMAN-HC10DT(防じん・防滴仕様), MOTOMAN-HC10DTF(食品仕様) |
|
| 2DCAD(DXF) | ||
| 3DCAD(IGS) |
※ 対応ISO:ISO9409
※ 2019年9月現在の内容です。規格については変更される場合がある為、製作いただく際は、お客様で必ず確認して製作して下さい。
お問い合わせ・ダウンロード
ソフマティックス™についてのお問い合わせは、各ボタンからお進みください。
お電話でのお問い合わせ
ニッタ・ムアー事業部 / 平日 9:00 〜17:30
製品一覧
* インターフェースはすべてのグリッパに装着可能です。
付属で、取付用のシールワッシャとM8キャップボルトがついています。
※1 グリッパのみの質量です。
※2 可搬質量は対象ワークによって増減します。
把持可否については、デモ機等でお試しください。
※3 想定ワークサイズとは、無理なくアプローチできる
ワークサイズを示します。
● 使用流体:空気
●使用温度範囲:5℃~45℃
● 耐薬品性:熱水・合成洗剤・
エタノールは使用可。
次亜塩素酸は使用不可。