

Just like a human hand,gently
"hold", "pinch", "pick up"
Robot hand for soft handling
Robot hand SOFTmatics™ uses an original gripping mechanism
to gently pick up and hold irregularly
shaped, mixed, or breakable objects.
Do you have any of
these problems?

We have to do it by hand…
But we can't afford that much manpower…

to handle due
to variation
in size…

to hold them due
to the irregular
shape…
workpiece…
in the
pick-and-place
…

A Gentle Solution to Your Worker Shortage Issue

Support conveyance automation with SOFTmatics™.
NITTA's “SOFTmatics™” can gently hold, pick up, and pinch the workpiece in place of the human hand for irregular shapes, mixed, or breakable objects.




Robot hand for soft handling
Features of SOFTmatics™
The 5 key points of SOFTmatics™.
Can hold workpieces that could not be held before
A unique gripping mechanism* enables smooth movement.Flexible urethane material allows for gentle handling without damage to delicate workpieces.*

Hygienic gripper allows for direct handling of foods
DiversityUses materials that comply with the Food Sanitation Act*
Also, it has no indentations or recesses, making it suitable for wipe/rinse cleaning.
* Ministry of Health and Welfare Notification No. 370 (as of May 2021)
* Gripper body part complies with FDA 21 CFR 177.2600 dissolution test (as of April 2023)

installation
Tool-less detachable mechanism for easy maintenance
No risk of screws falling when attaching/detaching, and work time is greatly reduced when cleaning or in changing stages.

weight
Made of aluminum and total weight 1.0 kg or less *
Made of aluminum and total weight 1.0 kg or less *
* Excluding adapter plate.

Perishable parts are repairable
Grippers can be repaired (fee required).
* Please contact us for information about repairable parts.

Robot hand for soft handling
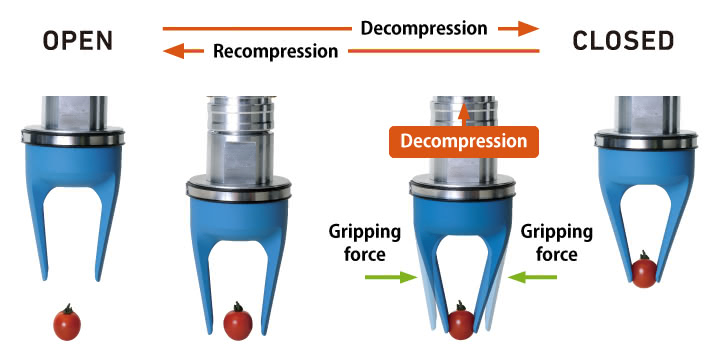
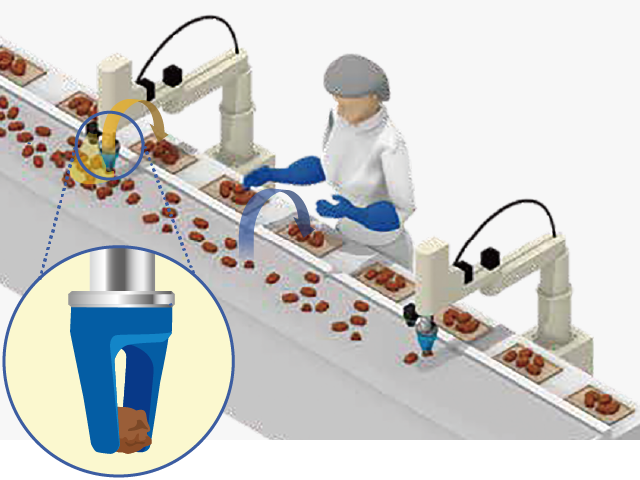
Operating principle of SOFTmatics™
Decompressing the inside of the hand works the gripper.
By recompressing, the gripper returns to the open state.
Original design of
simple gripping mechanism
- Gripper is driven by decompression force
- Turn the air circuit On or OFF to open or close.
- Gripping force can be changed by stepless
adjustment of pressure!
with video
Click here for operating principle

Introduction to the operating principles of SOFTmatics™.
Robot hand for soft handling
Examples of SOFTmatics™ in use.
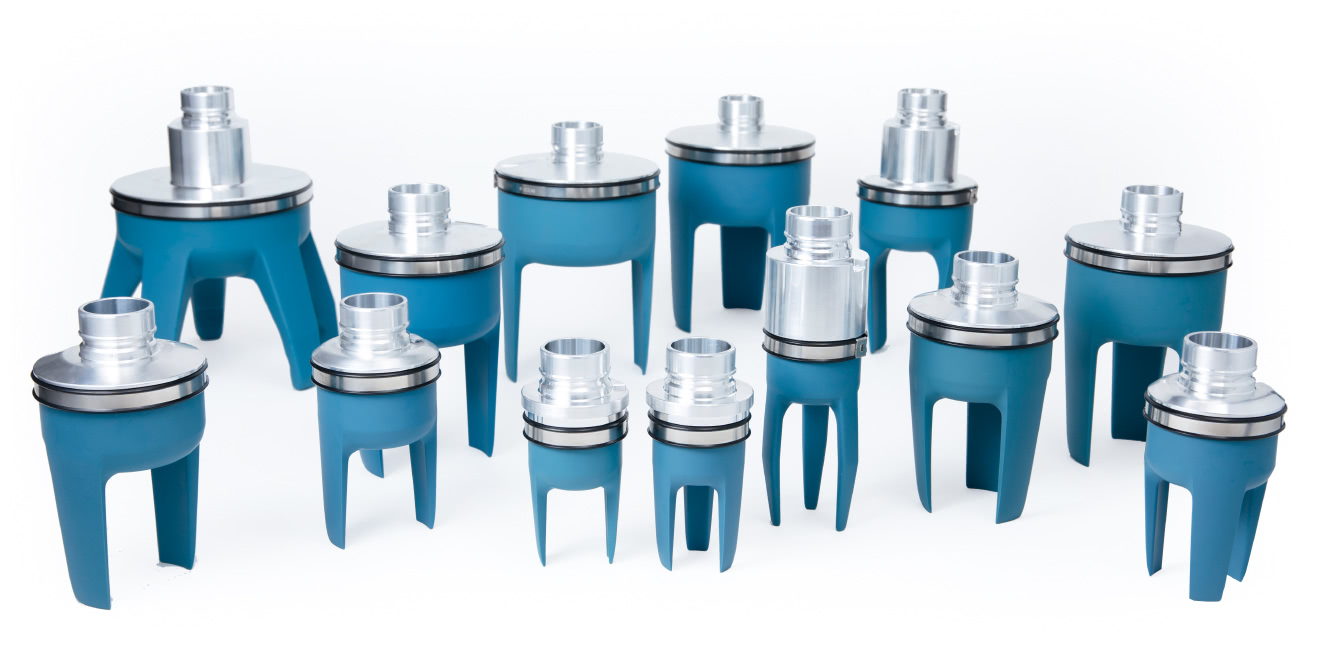
Gripper shape to suit workpieces from small to large
Grippers with different sizes and finger shapes can be used to 'Hold', 'Pick up' and 'pinch'.
Available in a range of sizes and shapes to best suit the workpiece.




with video
Visit here for video of gripping operation.
Foods










Vegetables and fruits
Resin containers / Bottles

Robot hand for soft handling
Applications of SOFTmatics™
Realization of tasks previously difficult to automate
Grippers of different sizes and finger shapes can be used for "hold", "pinch" and "pick up".
The line-up is available in a variety of sizes and shapes to best suit the workpiece.
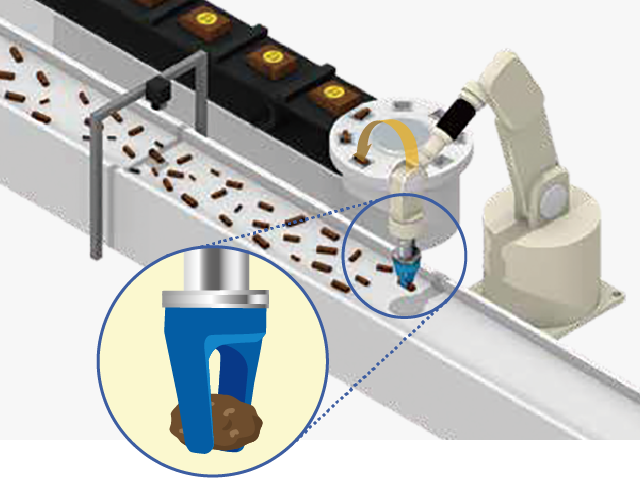
Feeding to packaging machine/weighing scales
The robot picks up workpieces on the conveyor that are recognized by vision and feeds them to the packaging machine. Use of SOFTmatics™ makes it possible to pick up foodstuffs of various sizes and shapes, such as chocolate.
Packing onto trays
A robot picks up foodstuffs from the conveyor and places them on trays. SOFTmatics™ uses flexible elastomer and decompression drive, making it gentle and safe for the work environment, and when used with a collaborative robot, workers can feel safe beside the robot.
* For actual operation, please be sure to conduct a risk assessment before use.
Others
Packing of products/parts in boxes
Loading/unloading workpieces into and from processing machine
Adjust to mixed sizes of
Baumkuchen cake and increase the grip rate.
Problem
The diameter of Baumkuchen may vary slightly due to seasonal variations in ingredients and processing conditions.
Therefore, previous robot hands caused chuck errors.
Solution
The SOFTmatics™ three-jaw type adjusts to the variation in diameter and individual variability of Baum-kuchen.
Chuck errores were improved.
Effect*Calculated based on customer
feedback with human hands.
Grip rate : 95-97% → 100%
Maintenance time: Max. 4 hours/day → 0 hours/day
Picking up items is faster, more accurate, and less tiring than with human hands. One-touch attachment and detachment for easy cleaning received a favorable evaluation.
with video
Click here for applications

Introduction to Baumkuchen
cake automation.

Adapted to sanitation.
Automation of
food production processes
Link to the official Denso Wave Corporation Youtube channel.

Picking of fried chicken
in bulk stacks.
Link to the official Omron Corporation Youtube channel.
Robot hand for soft handling
Product structure and piping layout of SOFTmatics™
The gripper can be opened and closed simply by On-Off of the valve.
By adjusting the pressure and flow rate, the gripping force and open/close time can be adjusted respectively.
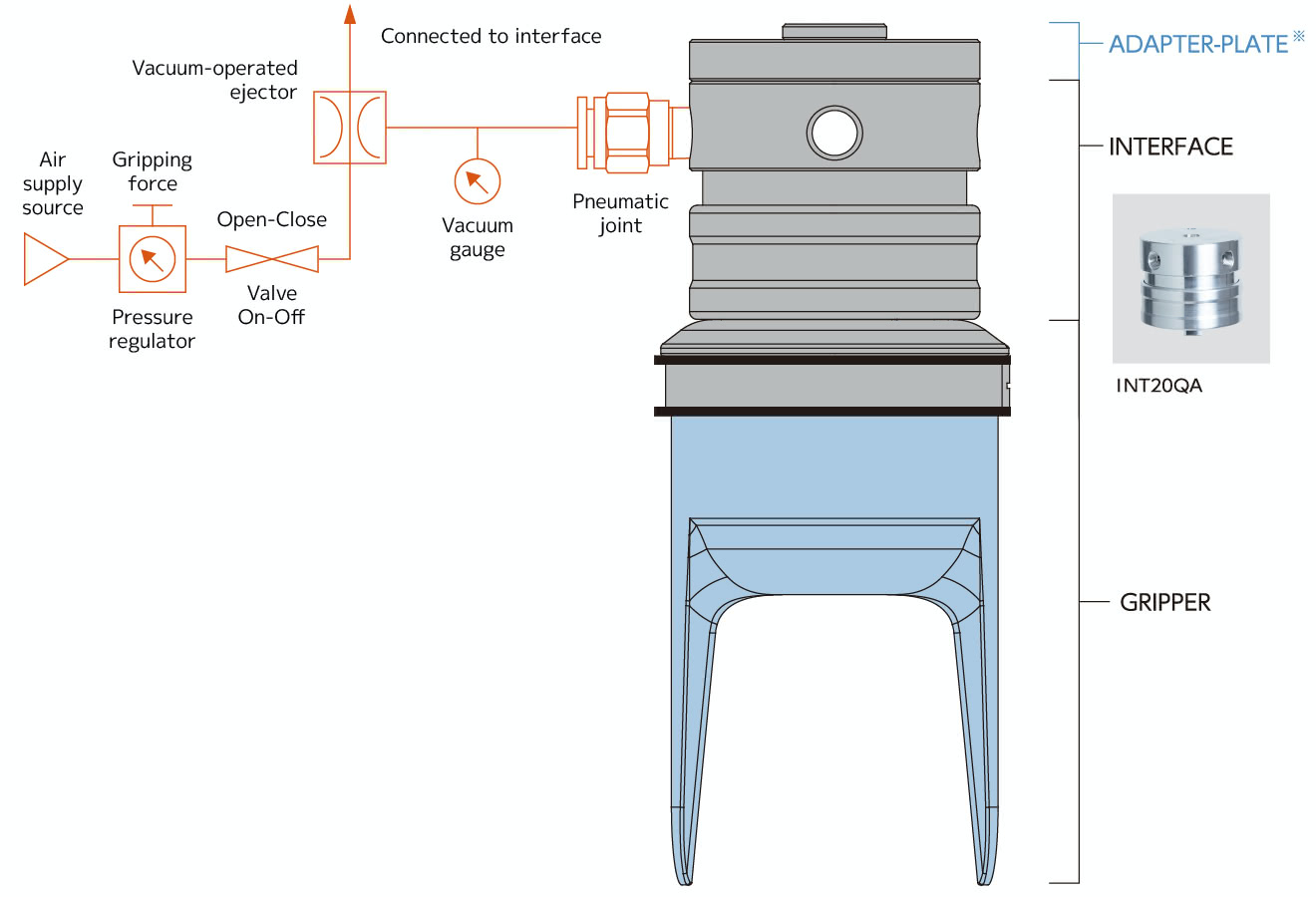
This product consists of an interface and a gripper. An adapter plate and its peripherals are required for use.
* Manufacture according to the interface and robot flange shape.
with video
Visit here for video of installation,
and pressure setting.

Installation instructions

Introduction of pressure settings
| Model | GR20QA -V3A |
GR20QA -DKA |
GR20QA -BMA |
GR20QA -PB2A |
GR20QA -PC2A |
GR20QA -PD2A |
GR20QA -PE2A |
GR20QA -PF2A |
GR20QA -PB3A |
GR20QA -PC3A |
GR20QA -PD3A |
GR20QA -PE3A |
GR20QA -PF3A |
INT20QA |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
| Weight (g)*1 |
786 | 436 | 233 | 174 | 285 | 371 | 554 | 815 | 177 | 290 | 380 | 567 | 831 | 155 |
| Reference weight capacity (g)*2 |
1380 | 400 | 200 | 120 | 210 | 260 | 320 | 390 | 80 | 250 | 330 | 330 | 460 | -- |
| Height H(mm) |
70 | 80 | 70 | 45 | 56 | 70 | 80 | 85 | 48 | 58 | 70 | 80 | 85 | -- |
| Maximum O.D. W (mm) |
178 | 87 | 60 | 56 | 70 | 85 | 100 | 115 | 56 | 70 | 85 | 100 | 115 | -- |
| Vacuum degree (-MPa) |
0.03 | 0.06 | 0.08 | 0.06 | 0.06 | 0.04 | 0.03 | 0.03 | 0.06 | 0.06 | 0.04 | 0.03 | 0.03 | -- |
| Estimated work-piece size (mm)*3 |
φ140 | φ40 | φ40 | φ20 | φ35 | φ50 | φ65 | φ80 | φ20 | φ35 | φ50 | φ65 | φ80 | -- |
| download drawings. | ||||||||||||||
| 2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
2DCAD (DXF) |
|
| 3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
3DCAD (IGS) |
The interface can be attached to all grippers. Seal washers and M8 cap bolts for installation are included.
*1 This is only the weight of the gripper.
*2 Weight capacity varies depending on the workpiece to be gripped. Please test with a demo machine for possiblity of gripping the workpiece. size that can be handled without difficulty.
*3 Estimated workpiece size indicates the size that can be handled without difficulty.
● Operating fluid : Air
● Working temperature range : 5°C ~ 45°C
● Chemical resistance: Hot water, synthetic detergent and ethanol can be used. Do not use hypochlorous acid.

An adapter plate is required for installation of the hand. Refer to the dimensional drawing of the interface and manufacture.
If the flange to be installed is ISO 9409-1, or a robot shown below, refer to the following adapter plate reference drawings.
| Adapter plate part number | Adapter plate drawing | Compatible flange shapes |
|---|---|---|
| A-ISO9409-1-2-AP | ISO9409-1-31.5-4-M5 | |
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-ISO9409-1-4-AP | ISO9409-1-50-4-M6 | |
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-Y0301-AP | YASKAWA Electric Corporation: MOTOMAN-HC10 |
|
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-Y0302-AP | YASKAWA Electric Corporation: MOTOMAN-HC10DT, MOTOMAN-HC10DT (hand-carry type) |
|
| 2DCAD(DXF) | ||
| 3DCAD(IGS) | ||
| A-Y0303-AP | YASKAWA Electric Corporation: MOTOMAN-HC10DT (dust-proof and drip-proof type), MOTOMAN-HC10DTF (food type) |
|
| 2DCAD(DXF) | ||
| 3DCAD(IGS) |
* Compatible ISO: ISO9409
* The content is current as of September 2019. Standards are subject to change without notice, please be sure to check them before manufacturing.
Inquiry・Download
For inquiries about SOFTmatics™, please click on the buttons below.
Contact by telephone
Nitta Moore Div. / Weekdays 9:00 to 17:30
Product line up
The interface can be attached to all grippers. Seal washers and M8 cap bolts for installation are included.
*1 This is only the weight of the gripper.
*2 Weight capacity varies depending on the workpiece to be gripped. Please test with a demo machine for possiblity of gripping the workpiece. size that can be handled without difficulty.
*3 Estimated workpiece size indicates the size that can be handled without difficulty.
● Operating fluid : Air
● Working temperature range : 5°C ~ 45°C
● Chemical resistance: Hot water, synthetic detergent and ethanol can be used. Do not use hypochlorous acid.